O efeito Hall e seu uso em impressoras 3D: uma breve reflexão sobre descobertas científicas (V.5, N.6 P.4, 2022)
Tempo estimado de leitura: 9 minute(s)
Nos últimos anos, temos presenciado a disseminação cada vez mais intensa das impressoras 3D, em suas várias formas e tecnologias. Apesar do nome “impressora”, esses artefatos são conhecidos nas linhas de produção como dispositivos de manufatura aditiva, uma vez que depositam o material ao objeto que está sendo criado, camada por camada. Contudo, o termo “impressora 3D” acabou se disseminando junto ao grande público e é utilizado de forma generalizada.
Definir referências geométricas em um sistema de manufatura aditiva é de fundamental importância, pois a deposição de material é uma atividade que leva em consideração as posições relativas do dispositivo extrusor e da peça semiacabada. A Figura 1 apresenta uma fotografia de um bico de impressora 3D e sua messa de impressão, cuja distância deve ser estabelecida com precisão.
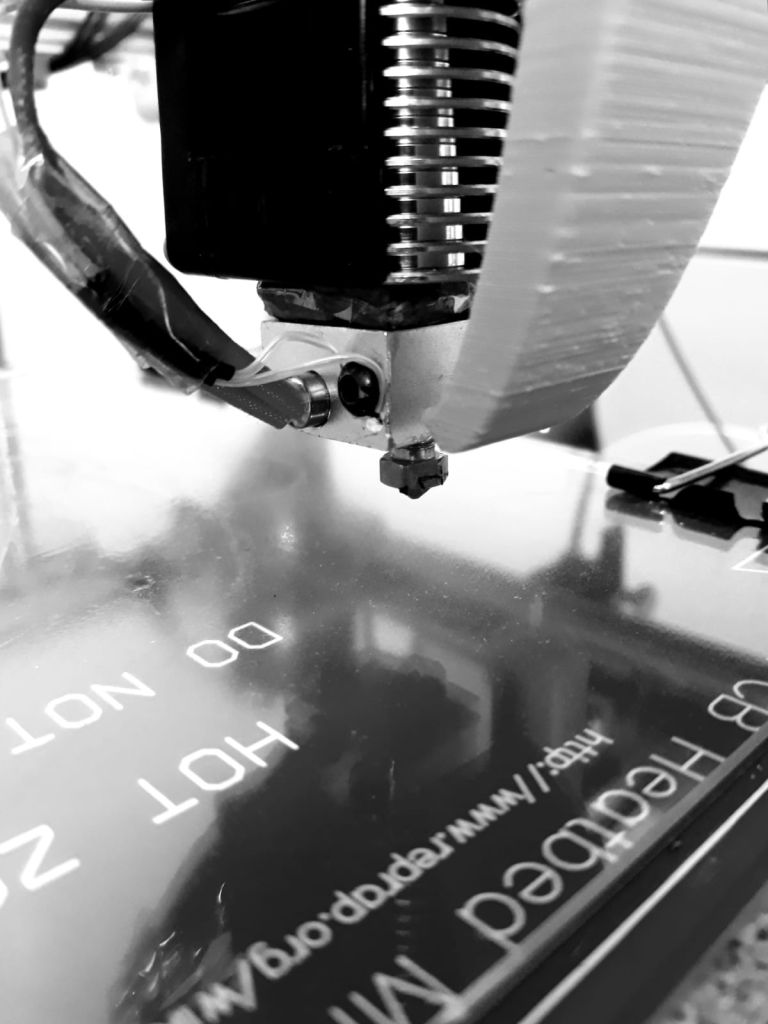
Figura 1. Cabeçote de uma impressora 3D como dispositivo extrusor, com o bico (centro) acoplado ao extrusor (em cima). A distância entre o bocal e a mesa de impressão é crucial para o funcionamento do tipo de dispositivo.
#ParaTodosVerem: Fotografia em preto e branco de um cabeçote de uma impressora 3D como dispositivo extrusor, com o bico (centro) acoplado ao extrusor (em cima).
Na maioria das impressoras 3D, a referência mais sensível é a posição vertical mínima, que, no jargão dos especialistas da área, é chamada carinhosamente de zmin.
É fácil de se entender por que essa medida é importante: depositar a primeira camada de material torna-se impossível se esse valor não for conhecido com precisão. A presença de uma placa (a mesa de impressão) limita o movimento do atuador apenas acima de zmin. As demais referências do plano horizontal, xmin e ymin, não necessitam de extrema precisão, podendo se desviar até alguns milímetros, pois a produção da peça utiliza a referência obtida nesses eixos, mas não é limitada por eles.
Melhorias recentes na tecnologia eletrônica trouxeram ao mercado uma nova classe de sensores de presença, baseados no efeito Hall. Esse efeito físico é conhecido desde 1879, quando o físico americano Edwin Herbert Hall o apresentou em sua monografia de doutorado [1]. O efeito Hall consiste na geração de uma diferença de tensão (a tensão Hall) através de um condutor elétrico que é transversal a uma corrente elétrica no condutor e um campo magnético aplicado perpendicularmente à corrente.
O sensor de efeito Hall pode ser construído a partir de uma fatia de metal condutor na qual podemos considerar que os elétrons são o único tipo de portador de carga. A tensão Hall VH (na condição de regime permanente) é derivada usando a força de Lorentz [2]
![]()
onde q é a carga elétrica do portador, E é o campo elétrico, v é a velocidade dos portadores e B é o campo magnético.
Considerando que a corrente está apenas no eixo x, as cargas não estão se movendo na direção do eixo y (veja a Figura 2). Assim, a força magnética em cada elétron na direção do eixo y é cancelada por uma força elétrica no eixo y devido ao acúmulo de cargas. O termo vx é a velocidade de deriva da corrente que é assumida neste ponto como buracos por convenção. O produto da velocidade e do campo magnético, o termo vx Bx é negativo na direção do eixo y pela regra da mão direita.
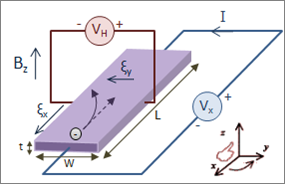
Figura 2. Esquema apresentando os componentes para explicar o efeito Hall (adaptado de [3]).
Neste estado estacionário, a força sobre os elétrons se anula, e temos Ey–vxBx=0. À medida que a corrente se desvia do caminho central, pode-se medir a presença de um campo elétrico induzido, representado por y, na direção -y, o que resulta em uma tensão VH como sendo proporcional a vx, Bz e a largura da fatia de metal, W:
Pondo em uma linguagem mais simples, isso significa que, dado um condutor com geometria fixa e corrente conhecida, a tensão Hall é proporcional à intensidade do campo magnético. Isso permite que os dispositivos de criação sejam extremamente sensíveis à variação dos campos magnéticos.
Entretanto, apesar de ser extremamente sensíveis, incluir um sensor de efeito Hall em uma impressora 3D não é assim tão trivial.
Como é muito difícil construir uma impressora 3D cuja mesa esteja perfeitamente alinhada (na horizontal) por meios mecânicos, é utilizado um procedimento para resolver este problema. Portanto, é necessário obter uma medição precisa do plano do leito de trabalho, para que uma superfície plana teórica possa ser modelada.
O leito foi modelado pela forma padrão da equação do plano:
Ax + By + Cz = D
Para um leito perfeitamente alinhado mecanicamente, A=0 e B=0. No entanto, essas são as variáveis que devem ser obtidas para que o software da impressora 3D possa simular um plano perfeitamente horizontal, mesmo que o leito de impressão esteja levemente desalinhado. Dadas as dimensões do dispositivo, consideramos apenas desvios de primeira ordem, ou seja, a superfície do leito é vista como um plano.
O algoritmo de alinhamento deve prosseguir com as medições z para vários pontos do leito de impressão. Embora o número mínimo de pontos seja 3, o que nos levaria imediatamente à equação do plano, preferimos usar uma estratégia mais sofisticada.
O método consiste em medir um certo número, N, de pontos (x,y,z) e fazer um ajuste de mínimos quadrados da equação do plano (Figura 3). Essa metodologia aumenta a precisão do resultado e não consome muito tempo para obter os valores, pois o caminho utilizado para fazer as medições na mesa pode ser otimizado.
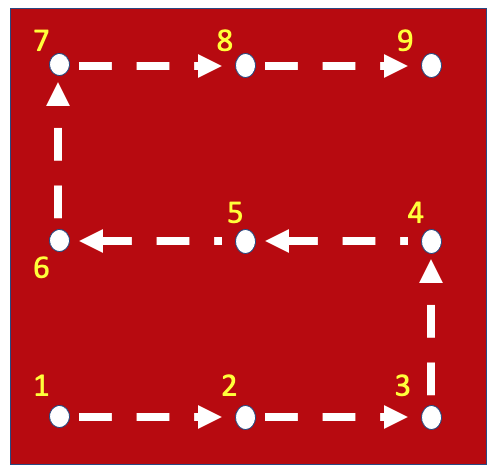
Figura 3. Sequência de medição otimizada sobre o leito para N=9.
#ParaTodosVerem: imagem vermelha com caminho em ziguezague em branco com pontos de um a nove começando a ser enumerado do canto inferior esquerdo até o canto superior direito.
Em nossas experiências, utilizamos como sensor de posição um dispositivo semicondutor de efeito Hall, obtido da empresa Antclabs [4], denominado BLTouch (Figura 4). Este sensor possui uma sonda diretamente conectada ao núcleo de efeito Hall, cuja posição afeta seu campo magnético. Quando não estiver em uso, a sonda pode ficar escondida, mantida dentro do corpo do sensor, o que é uma propriedade muito interessante para uso em impressoras 3D, pois nessa posição não afeta o movimento da cabeça (Figura 5). A precisão do BLTouch é de 0,5 μm.
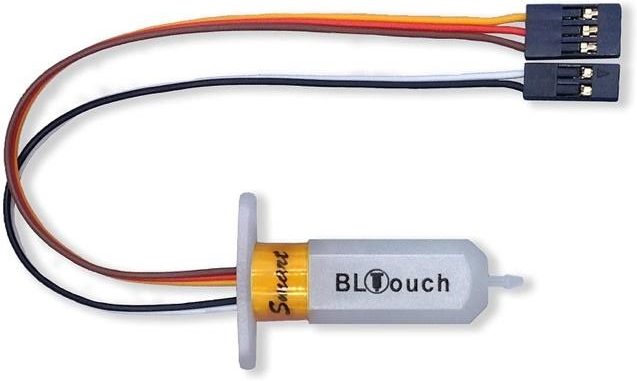
Figura 4. BLTouch, um sensor de efeito Hall da Antclabs [4] que utiliza um semicondutor em seu núcleo.
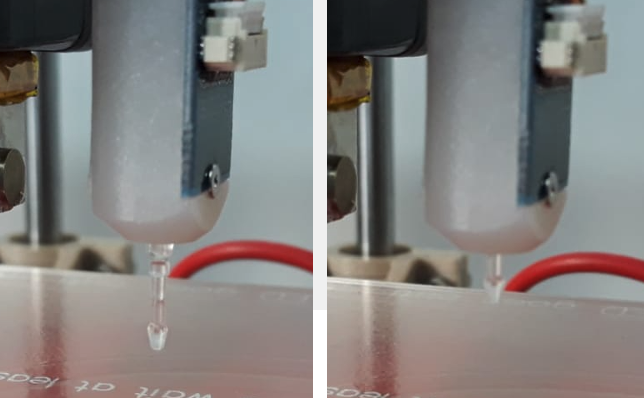
Figura 5. Posições do probe BLTouch: expandido (imagem à esquerda) e retido (imagem à direita).
O sensor é fixado na cabeça da impressora, o mais próximo possível do bico extrusor com um posicionador ajustável. Isso é necessário devido à configuração da distância entre a sonda do sensor e a extremidade do bico. A empresa Antclabs sugere que essa distância, Zoffset, esteja entre 2,3 e 4,3 mm para permitir que a sonda seja implantada livremente [5] (veja a Figura 6).
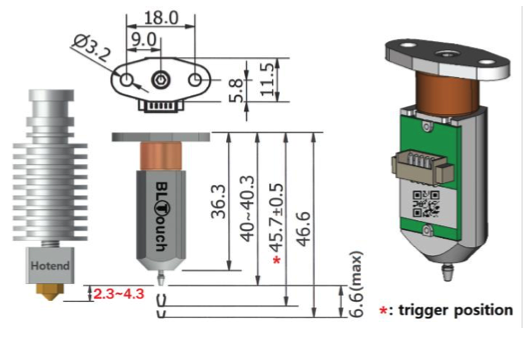
Figura 6. Sonda BLTouch: dimensões e deslocamento vertical relativo em relação ao bico quente (adaptado de [5]).
Uma vez instalado fisicamente, o sensor é conectado aos terminais do controlador destinados à distância vertical mínima, zmin. Resta agora determinar a distância vertical entre a sonda do sensor e o ponto do bico de extrusão, Z_offset.
O procedimento para esta medição é realizado seguindo uma sequência de comandos enviados manualmente ao controlador. A codificação apresentada está em g-code, uma linguagem de programação de controle numérico computadorizado (CNC) amplamente utilizada [6]. É usado principalmente na fabricação assistida por computador para controlar máquinas-ferramentas automatizadas e possui algumas variantes.
A programação da impressora deve ser modificada com a sequência de códigos para o uso do BLTouch. Após este procedimento, o novo Zoffset é armazenado na memória da impressora e será utilizado juntamente com o plano Z ajustado.
Com isso, temos uma impressora 3D com um ajuste de zmin automatizado e mais preciso, o que facilita em muito o trabalho de quem trabalha com esta classe de artefatos.
A ciência evolui assim: toda descoberta encontra seu lugar, mesmo que seja depois de um século. Hoje, os sensores de efeito Hall estão disponíveis no mercado e são usados em vários dispositivos, como sensores de velocidade de rotação, sensores de fluxo de fluido, sensores de corrente e sensores de pressão. Eles são encontrados em gatilhos de armas de paintball, controles de velocidade de, telefones inteligentes e alguns sistemas de posicionamento global, como o GPS.
Como vemos, uma descoberta de 1879 (o mesmo ano do nascimento de Albert Einstein) acaba por ser utilizada em uma das mais famosas tecnologias de nossos tempos.


